MEDIRL: Predicting the Visual Attention of Drivers via Maximum Entropy Deep Inverse Reinforcement Learning.
Zusammenfassung
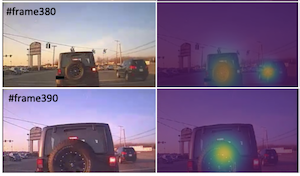
Inspiriert von der menschlichen visuellen Aufmerksamkeit schlagen wir eine neuartige Formulierung des inversen bestärkenden Lernens unter Verwendung von Maximum Entropy Deep Inverse Reinforcement Learning (MEDIRL) vor, um die visuelle Aufmerksamkeit von Fahrern in unfallträchtigen Situationen vorherzusagen. MEDIRL sagt Fixationsorte vorher, die zu maximalen Belohnungen führen, indem es eine aufgabensensitive Belohnungsfunktion aus den von aufmerksamen Fahrern aufgezeichneten Augenfixationsmustern lernt. Zusätzlich führen wir EyeCar ein, einen neuen Datensatz zur Fahreraufmerksamkeit in unfallträchtigen Situationen. Wir führen umfassende Experimente durch, um unser vorgeschlagenes Modell auf drei gängigen Benchmarks (DR(eye)VE, BDD-A, DADA-2000) sowie auf unserem EyeCar-Datensatz zu evaluieren. Die Ergebnisse zeigen, dass MEDIRL bestehende Modelle zur Vorhersage von Aufmerksamkeit übertrifft und eine Leistung auf dem Stand der Technik erreicht. Wir präsentieren umfangreiche Ablationsstudien, um tiefere Einblicke in verschiedene Merkmale unseres vorgeschlagenen Modells zu geben.
Details
Zitation
@inproceedings{baee2021medirl,
title = {MEDIRL: Predicting the Visual Attention of Drivers via Maximum Entropy Deep Inverse Reinforcement Learning.},
author = {Baee, Sonia and Pakdamanian, Erfan and Kim, Inki and Feng, Lu and Ordonez, Vicente and Barnes, Laura},
year = {2021},
booktitle = {International Conference on Computer Vision. ICCV 2021},
url = {https://arxiv.org/abs/1912.07773},
}