보도 자료 요약
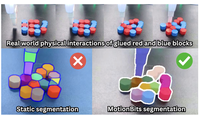
라이스 대학교와 텍사스 대학교 댈러스 캠퍼스(University of Texas at Dallas)의 연구자들은 개별 강체 객체가 어떻게 보이는지에 의존하는 대신 물리적으로 어떻게 움직이는지를 분석하여 이를 식별하고 추적하도록 설계된 새로운 비디오 분할 시스템을 개발했다. 이들이 다룬 핵심 문제는 Segment Anything과 같은 강력한 파운데이션 모델을 포함한 기존 분할 모델이 시각적 외형과 인간이 정의한 객체 범주를 기준으로 장면을 나눈다는 점인데, 이로 인해 단일 복합 객체를 너무 많은 조각으로 쪼개거나 별개로 움직이는 부분을 하나로 묶어버리는 결과가 발생한다. 이를 해결하기 위해 연구팀은 강체 운동학에 기반한 "MotionBit"이라는 새로운 개념을 정의했는데, 이는 비디오 클립 전체에 걸쳐 동일한 공간 트위스트, 즉 본질적으로 동일한 순간 회전 및 병진 운동을 공유하는 경우에만 이미지 픽셀을 하나로 묶는다. 이 정의를 바탕으로 연구팀은 학습이 필요 없는 그래프 기반 알고리즘을 만들었는데, 이 알고리즘은 옵티컬 플로우를 사용해 샘플링된 이미지 점들의 국소 운동을 추정하고, 운동학적 일관성으로 가중치를 부여한 유사도 그래프를 구성한 뒤, 노드를 별개의 강체 분할로 군집화하며 SAM 2를 사용해 경계를 정리한다. 이 접근법을 평가하기 위해 연구팀은 또한 원격 조작 로봇 조작과 일상적인 인간-객체 상호작용을 아우르는 349개 비디오의 새로운 수작업 레이블링 벤치마크인 MoRiBo를 구축했다. 이 벤치마크에서 시험한 결과, 이들의 방법은 평균 교집합 대 합집합 비율(mIoU) 기준으로 최신 비전-언어 모델 및 모션 분할 경쟁 방법을 평균 37.3 퍼센트 포인트 능가했다. 실제 로봇 시연에서는 이 시스템이 로봇으로 하여금 복합 블록 객체를 탑으로 쌓는 데 10번의 시도 중 6번 성공하도록 했으며, SAM이나 언어 모델 추론에 기반한 경쟁 방법은 한 번도 성공하지 못했다. 이는 모션 인식 분할이 복잡하고 어수선한 실세계 환경에서 작동하는 로봇에게 유의미한 빠진 조각이 될 수 있다는 주장을 뒷받침한다.
초록
강체(rigid body)는 실세계에서 조작 가능한 가장 작은 요소를 구성하며, 이들이 물리적으로 어떻게 상호작용하는지를 이해하는 것은 체화된 추론(embodied reasoning)과 로봇 조작의 근본이 된다. 따라서 움직이는 강체를 정확하게 검출, 분할, 추적하는 것은 추론 모듈이 다양한 환경을 해석하고 행동하도록 하는 데 필수적이다. 그러나 의미론적 그룹화로 학습된 현재의 분할 모델은 체화된 작업을 완수하는 데 유의미한 상호작용 수준의 단서를 제공하는 능력이 제한적이다. 이러한 간극을 해소하기 위해, 우리는 MotionBit이라는 새로운 개념을 도입한다. 이는 기존 정식화와 달리, 의미론과 무관하게 운동학적 공간 트위스트 등가성(kinematic spatial twist equivalence)을 통해 모션 기반 분할의 최소 단위를 정의한다. 본 논문에서 우리는 (1) MotionBit 개념과 정의, (2) 로봇 조작 및 실세계 인간(human-in-the-wild) 비디오 전반에 걸쳐 움직이는 강체 분할을 평가하기 위한 MoRiBo라는 수작업 레이블링 벤치마크, 그리고 (3) MoRiBo 벤치마크에서 매크로 평균 mIoU 기준으로 최신 체화된 인지 방법을 37.3\% 능가하는 학습이 필요 없는(learning-free) 그래프 기반 MotionBits 분할 방법을 기여한다. 마지막으로, 우리는 다운스트림 체화된 추론 및 조작 작업에 대해 MotionBits 분할의 효과를 입증하며, 이것이 물리적 상호작용을 이해하기 위한 근본적 원시 요소(primitive)로서 갖는 중요성을 강조한다.
세부 정보
인용
@article{qianmotionbits,
title = {MotionBits: Video Segmentation through Motion-Level Analysis of Rigid Bodies},
author = {Qian, Howard H. and Ren, Kejia and Xiang, Yu and Ordonez, Vicente and Hang, Kaiyu},
journal = {arXiv preprint arXiv:2603.06846},
url = {https://arxiv.org/abs/2603.06846},
}
이 논문의 자동 생성된 질문, 주요 기여 및 한계
이 논문이 답하는 데 도움이 되는 질문
- MotionBit이란 무엇이며 어떻게 정의되는가? MotionBit은 모션 기반 분할의 최소 단위로서, 운동학적 공간 트위스트 등가성을 통해 형식적으로 정의된다. 즉, 픽셀이나 점은 시각적 외형이나 의미론적 클래스와 무관하게, 관측 시간 윈도우 전체에 걸쳐 동일하고 0이 아닌 공간 트위스트 궤적을 공유하는 경우에 한해 같은 MotionBit에 속한다.
- MoRiBo란 무엇이며 무엇을 포함하는가? MoRiBo는 실세계 RGB 비디오에서 움직이는 강체 분할을 평가하기 위한 최초의 수작업 레이블링 벤치마크로, BridgeData V2에서 수집한 270개의 로봇 조작 비디오와 SA-V에서 가져온 79개의 실세계 인간(human-in-the-wild) 비디오를 포함하며, 독립적인 운동을 보인 각 강체 부분에 대해 수작업으로 검증된 최종 프레임 분할 마스크를 제공한다.
- 제안된 방법은 큰 틀에서 어떻게 작동하는가? 이 방법은 학습이 필요 없고 그래프 기반이다. 프레임마다 균일 격자의 점들을 샘플링하고, 옵티컬 플로우와 Kabsch 추정을 결합한 수정된 RANSAC을 사용하여 국소 공간 트위스트를 추정하며, 마할라노비스 거리(Mahalanobis-distance) 간선 가중치로 공간 트위스트 유사도 그래프를 구성한 다음, 소프트 레이블 전파(soft label propagation)에 이어 하드 마르코프 군집화(hard Markov clustering)를 적용하고, 마지막으로 SAM 2를 사용해 분할 경계를 정제한다.
- 제안된 방법은 MoRiBo에서 베이스라인을 얼마나 능가하는가? 이 방법은 두 벤치마크 트랙 모두에서 매크로 평균 mIoU 기준으로 평가된 모든 베이스라인을 평균 37.3 퍼센트 포인트 능가하며, 가장 강력한 두 베이스라인인 Qwen2.5-VL과 Segment Any Motion in Videos를 mIoU 기준으로 32.1 퍼센트 포인트 능가한다.
- 어떤 다운스트림 작업이 MotionBits 분할의 이점을 누리는가? 두 가지 다운스트림 작업이 시연되었다. 첫째는 시각적으로 그라운딩된 시각 질의응답(visual question answering)으로, MotionBits 마스크를 set-of-mark 프롬프트로 겹쳐 놓으면 어떤 객체가 움직였는지 식별하는 비전-언어 모델의 능력이 상당히 향상된다. 둘째는 로봇 탑 쌓기로, 로봇은 MotionBits 마스크를 사용해 10번 중 6번 성공적으로 쌓은 반면, SAM, SAMIV, QwenVL은 한 번도 성공하지 못했다.
주요 기여
- 본 논문은 SE(3)의 강체 운동학에서 유도된 운동학적 공간 트위스트 등가성을 통해 정의된, 수학적으로 근거가 있고 의미론과 무관한 분할 원시 요소인 MotionBit 개념을 도입한다.
- 본 논문은 로봇 조작과 실세계 인간(human-in-the-wild) 상호작용 영역을 아우르는 349개의 수작업 레이블링 비디오를 갖춘, 실세계에서 움직이는 강체 분할을 위한 최초의 벤치마크인 MoRiBo를 기여한다.
- 본 논문은 RGB 비디오에 대해 온라인으로 동작하며 로봇 조작 트랙에서 52.6 퍼센트의 mIoU를, 실세계 인간(human-in-the-wild) 트랙에서 46.7 퍼센트의 mIoU를 달성하여 평가된 모든 베이스라인을 능가하는, 학습이 필요 없는 그래프 기반 분할 파이프라인을 제시한다.
- 100,000회 시행의 몬테카를로 민감도 분석은 전체 SE(3) 문제를 SE(2) 운동 모델로 축소하는 것을 정량적으로 정당화하며, 로봇 작업 공간과 실세계 조건 모두에서 평균 운동학적 오차가 1 퍼센트 미만임을 보인다.
- 접착된 복합 블록 객체를 사용한 실세계 로봇 실험은 MotionBits 마스크가 60 퍼센트의 성공률로 성공적인 탑 쌓기를 가능하게 함을 입증하며, 모션 수준의 분할이 실행 가능한 조작 단서로 이어진다는 구체적 증거를 제공한다.
한계 및 유의 사항
- 현재 방법은 주로 정적 카메라 가정 하에서 평가되는데, 이는 운동 분석을 깔끔하고 명확하게 범위를 한정해 준다. 동일한 MotionBit 정식화를 전체 SE(3) 카메라 자기 운동(ego-motion) 보정으로 확장하는 것은 카메라가 크게 움직이는 설정을 위한 자연스러운 다음 단계이다.
- MoRiBo는 각 비디오의 최종 프레임에 대한 수작업 정답을 제공하는데, 이는 본 논문의 주된 분할 지표와 일치한다. 조밀한 시간적 주석을 갖춘 향후 벤치마크는 MotionBits가 전체 시퀀스에 걸쳐 강체 부분을 얼마나 일관되게 추적하는지를 더 잘 보여줄 수 있을 것이다.
- 구현된 그래프 파이프라인은 MotionBit 정의가 전체 SE(3) 강체 운동에 근거함에도 SE(2) 근사를 사용한다. 본 논문의 대규모 몬테카를로 민감도 연구는 시험된 조건 하에서 평균 운동학적 오차가 1 퍼센트 미만임을 보고하여, 이를 실용적이고 충분히 정당화된 공학적 선택으로 만든다.
- 로봇 시연은 접착된 색깔 블록과 하나의 로봇 팔을 사용하는 통제된 탁상 환경을 활용하는데, 이는 다운스트림 조작 증거를 해석하기 쉽게 한다. 다양한 객체, 재질, 환경을 사용한 더 광범위한 시험은 이미 설득력 있는 유용성 증명에 대한 가치 있는 확장이 될 것이다.
- 여러 베이스라인은 움직이는 강체 분할을 위해 특별히 구축되지 않았으며, VLM 베이스라인은 마스크를 생성하기 위해 추가적인 분할 단계가 필요하다. 그럼에도 이 비교는 외형 기반 및 언어 기반 시스템이 제안된 방법이 직접 포착하는 모션 수준 구조를 놓친다는 점을 유용하게 보여준다.
이 결과를 읽는 방법
이 논문은 강력한 기초적 기여로 읽는 것이 가장 좋다. 이 논문은 강체 비디오 분할에 명확한 물리적 정의를 부여하고, 이를 새로운 벤치마크와 큰 실험적 향상으로 뒷받침하며, 모션 수준 마스크가 로봇 조작을 직접 개선할 수 있음을 보이는 한편, 더 폭넓은 실세계 배치를 위한 명확히 범위가 정해진 기회를 남겨둔다.