MEDIRL: Predicting the Visual Attention of Drivers via Maximum Entropy Deep Inverse Reinforcement Learning.
abstract
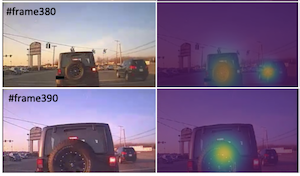
Ispirandoci all'attenzione visiva umana, proponiamo una nuova formulazione di inverse reinforcement learning basata sul Maximum Entropy Deep Inverse Reinforcement Learning (MEDIRL) per prevedere l'attenzione visiva dei guidatori in situazioni a rischio di incidente. MEDIRL prevede le posizioni di fissazione che portano alla massima ricompensa apprendendo una funzione di ricompensa sensibile al compito a partire dagli schemi di fissazione oculare registrati da guidatori attenti. Inoltre, introduciamo EyeCar, un nuovo dataset sull'attenzione dei guidatori in situazioni a rischio di incidente. Conduciamo esperimenti completi per valutare il modello proposto su tre benchmark comuni: (DR(eye)VE, BDD-A, DADA-2000) e sul nostro dataset EyeCar. I risultati indicano che MEDIRL supera i modelli esistenti nella previsione dell'attenzione e raggiunge prestazioni allo stato dell'arte. Presentiamo estesi studi di ablazione per fornire ulteriori approfondimenti sulle diverse caratteristiche del modello proposto.
dettagli
citazione
@inproceedings{baee2021medirl,
title = {MEDIRL: Predicting the Visual Attention of Drivers via Maximum Entropy Deep Inverse Reinforcement Learning.},
author = {Baee, Sonia and Pakdamanian, Erfan and Kim, Inki and Feng, Lu and Ordonez, Vicente and Barnes, Laura},
year = {2021},
booktitle = {International Conference on Computer Vision. ICCV 2021},
url = {https://arxiv.org/abs/1912.07773},
}