プレスリリース要約
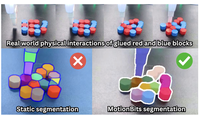
ライス大学とテキサス大学ダラス校の研究者らは、個々の剛体を、それがどう見えるかに頼るのではなく、物理的にどのように動くかを分析することで識別し追跡するように設計された新しい動画セグメンテーションシステムを開発した。彼らが取り組んだ中心的な問題は、Segment Anythingのような強力な基盤モデルを含む既存のセグメンテーションモデルが、視覚的な見た目と人間が定義した物体カテゴリに基づいてシーンを切り分けるため、単一の複合物体をあまりに多くの断片に分割するか、別々に動く部分をひとまとめにしてしまうかのいずれかに陥ることである。これに対処するため、研究チームは剛体運動学に根ざした「MotionBit」と呼ばれる新しい概念を定義した。これは、動画クリップ全体を通じて同じ空間ツイスト、本質的には同じ瞬間的な回転・並進運動を共有する場合にのみ、画像ピクセルをまとめてグループ化する。その定義に基づき、彼らは学習不要のグラフベースのアルゴリズムを作成した。これは、オプティカルフローを用いてサンプリングされた画像点の局所運動を推定し、運動学的整合性で重み付けされた類似度グラフを構築し、次にノードを別個の剛体セグメントへとクラスタリングし、SAM 2を用いて境界を整える。この手法を評価するため、研究チームはまた、遠隔操作によるロボット操作と日常的な人間と物体の相互作用にまたがる349本の動画からなる、新しい人手でラベル付けされたベンチマークであるMoRiBoを構築した。そのベンチマークで検証したところ、彼らの手法は平均交差率において最先端の動画言語モデルと運動セグメンテーションの競合手法を平均37.3ポイント上回った。実用的なロボットの実演では、このシステムはロボットが複合的なブロック物体を10回中6回で塔状にうまく積み上げることを可能にしたのに対し、SAMや言語モデルの推論に基づく競合手法は成功ゼロであり、運動を意識したセグメンテーションが、雑然とした現実世界の環境で動作するロボットにとって意味のある欠落部分となり得るという主張を裏付けている。
要旨
剛体は現実世界における操作可能な最小の要素を構成しており、それらがどのように物理的に相互作用するかを理解することは、身体化された推論とロボットによる操作にとって基本的である。したがって、運動する剛体の正確な検出、セグメンテーション、追跡は、推論モジュールが多様な環境を解釈し行動できるようにするために不可欠である。しかし、意味的なグループ化に基づいて訓練された現在のセグメンテーションモデルは、身体化されたタスクを遂行するための意味のある相互作用レベルの手がかりを提供する能力において限界がある。この隔たりに対処するため、我々はMotionBitを導入する。これは、従来の定式化とは異なり、意味とは独立に、運動学的な空間ツイストの等価性を通じて運動ベースのセグメンテーションにおける最小単位を定義する新しい概念である。本論文では、(1)MotionBitの概念と定義、(2)ロボット操作および実環境における人間の動画にまたがって運動する剛体のセグメンテーションを評価するための、MoRiBoと呼ばれる人手でラベル付けされたベンチマーク、(3)MoRiBoベンチマークにおいてマクロ平均mIoUで最先端の身体化知覚手法を37.3\%上回る、学習不要のグラフベースのMotionBitsセグメンテーション手法を貢献する。最後に、下流の身体化された推論および操作タスクに対するMotionBitsセグメンテーションの有効性を実証し、物理的相互作用を理解するための基本的なプリミティブとしてのその重要性を強調する。
詳細
引用
@article{qianmotionbits,
title = {MotionBits: Video Segmentation through Motion-Level Analysis of Rigid Bodies},
author = {Qian, Howard H. and Ren, Kejia and Xiang, Yu and Ordonez, Vicente and Hang, Kaiyu},
journal = {arXiv preprint arXiv:2603.06846},
url = {https://arxiv.org/abs/2603.06846},
}
この論文について自動生成された質問、主な貢献、および限界
この論文が答える助けとなる質問
- MotionBitとは何であり、どのように定義されるのか。MotionBitは運動ベースのセグメンテーションにおける最小単位であり、運動学的な空間ツイストの等価性を通じて形式的に定義される。すなわち、ピクセルまたは点は、その視覚的な見た目や意味クラスとは独立に、観測時間窓全体を通じて同一の非ゼロの空間ツイスト軌道を共有する場合に限り、同じMotionBitに属する。
- MoRiBoとは何であり、何を含むのか。MoRiBoは、現実世界のRGB動画における運動する剛体のセグメンテーションを評価するための初の人手ラベル付きベンチマークである。これは、BridgeData V2から取得した270本のロボット操作動画とSA-Vからの79本の実環境における人間の動画を含み、独立した運動を示した各剛体部分について手作業で検証された最終フレームのセグメンテーションマスクを備えている。
- 提案手法は高い水準でどのように機能するのか。本手法は学習不要でグラフベースである。フレームごとに均一なグリッド上の点をサンプリングし、オプティカルフローとKabsch推定を用いた修正版RANSACを用いて局所的な空間ツイストを推定し、マハラノビス距離のエッジ重みを持つ空間ツイスト類似度グラフを構築し、次にソフトラベル伝播に続いてハードなマルコフクラスタリングを適用し、最後にSAM 2を用いてセグメント境界を精緻化する。
- 提案手法はMoRiBoにおいてベースラインをどの程度上回るのか。本手法は、両方のベンチマークトラックにわたってマクロ平均mIoUで全評価ベースラインを平均37.3ポイント上回り、最も強い二つのベースラインであるQwen2.5-VLおよびSegment Any Motion in VideosをmIoUで32.1ポイント上回る。
- MotionBitsセグメンテーションはどのような下流タスクに恩恵をもたらすか。二つの下流タスクが実証されている。視覚的に根拠付けられた視覚的質問応答では、MotionBitsマスクをset-of-markプロンプトとして重ね合わせることで、どの物体が動いたかを識別する視覚言語モデルの能力が大幅に向上する。またロボットによる塔の積み上げでは、ロボットはMotionBitsマスクを用いて10回中6回の積み上げに成功したのに対し、SAM、SAMIV、QwenVLは成功ゼロであった。
主な貢献
- 本論文は、SE(3)における剛体運動学から導かれる運動学的な空間ツイストの等価性を通じて定義された、数学的に根拠付けられ意味から独立したセグメンテーションのプリミティブであるMotionBitの概念を導入する。
- 本論文は、ロボット操作と実環境における人間の相互作用の領域にまたがる349本の人手ラベル付き動画を備えた、現実世界の運動する剛体のセグメンテーションのための初のベンチマークであるMoRiBoを貢献する。
- 本論文は、RGB動画に対してオンラインで動作し、ロボット操作トラックで52.6パーセントのmIoU、実環境における人間のトラックで46.7パーセントのmIoUを達成し、全評価ベースラインを上回る、学習不要のグラフベースのセグメンテーションパイプラインを提示する。
- 100,000回の試行によるモンテカルロ感度分析は、完全なSE(3)問題をSE(2)運動モデルへ縮約することを定量的に正当化し、ロボット作業空間と実環境の両条件下で平均運動学的誤差が1パーセントを下回ることを示している。
- 複合的な接着ブロック物体を用いた現実世界のロボット実験は、MotionBitsマスクが60パーセントの成功率で塔の積み上げを可能にすることを実証し、運動レベルのセグメンテーションが実行可能な操作の手がかりへと変換されるという具体的な証拠を提供している。
限界と注意点
- 現在の手法は主に静的カメラの仮定の下で評価されており、これが運動分析を明快で適切に範囲づけられたものに保っている。同じMotionBitの定式化を完全なSE(3)のカメラ自己運動補償で拡張することは、高い可動性を持つカメラ設定にとって自然な次の一歩である。
- MoRiBoは各動画の最終フレームに人手によるグラウンドトゥルースを提供しており、これは本論文の主要なセグメンテーション指標と一致している。密な時間的アノテーションを備えた将来のベンチマークは、MotionBitsがシーケンス全体にわたって剛体部分をどれほど一貫して追跡するかをさらに示すことができるだろう。
- MotionBitの定義は完全なSE(3)の剛体運動に根ざしているにもかかわらず、実装されたグラフパイプラインはSE(2)近似を用いている。本論文の大規模なモンテカルロ感度研究は、検証された条件下で平均運動学的誤差が1パーセント未満であると報告しており、これを実用的で十分に正当化された工学的選択としている。
- ロボットの実演は、接着された色付きブロックと一本のロボットアームを用いた統制された卓上のセットアップを使用しており、これが下流の操作の証拠を解釈しやすくしている。多様な物体、材質、環境を用いたより広範な検証は、すでに説得力のある有用性の証明をさらに価値あるものにする拡張となるだろう。
- いくつかのベースラインは運動する剛体のセグメンテーション専用に構築されたものではなく、VLMベースラインはマスクを生成するために追加のセグメンテーションステップを必要とする。それでもこの比較は、見た目ベースおよび言語ベースのシステムが、提案手法が直接捉える運動レベルの構造を見逃すことを有用に示している。
この結果の読み解き方
本論文は、強力な基礎的貢献として読むのが最も適切である。すなわち、剛体の動画セグメンテーションに明確な物理的定義を与え、新しいベンチマークと大きな経験的向上でそれを裏付け、運動レベルのマスクがロボット操作を直接改善し得ることを示す一方で、より広範な現実世界への展開のための適切に範囲づけられた機会を残している。