MEDIRL: Predicting the Visual Attention of Drivers via Maximum Entropy Deep Inverse Reinforcement Learning.
abstract
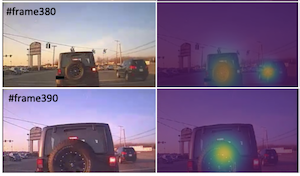
Inspired by human visual attention, we propose a novel inverse reinforcement learning formulation using Maximum Entropy Deep Inverse Reinforcement Learning (MEDIRL) for predicting the visual attention of drivers in accident-prone situations. MEDIRL predicts fixation locations that lead to maximal rewards by learning a task-sensitive reward function from eye fixation patterns recorded from attentive drivers. Additionally, we introduce EyeCar, a new driver attention dataset in accident-prone situations. We conduct comprehensive experiments to evaluate our proposed model on three common benchmarks: (DR(eye)VE, BDD-A, DADA-2000), and our EyeCar dataset. Results indicate that MEDIRL outperforms existing models for predicting attention and achieves state-of-the-art performance. We present extensive ablation studies to provide more insights into different features of our proposed model.
details
citation
@inproceedings{baee2021medirl,
title = {MEDIRL: Predicting the Visual Attention of Drivers via Maximum Entropy Deep Inverse Reinforcement Learning.},
author = {Baee, Sonia and Pakdamanian, Erfan and Kim, Inki and Feng, Lu and Ordonez, Vicente and Barnes, Laura},
year = {2021},
booktitle = {International Conference on Computer Vision. ICCV 2021},
url = {https://arxiv.org/abs/1912.07773},
}